Many of those, who tried to use Zabbix for monitoring SNMP capable devices faced with need of creating value mappings. It’s ok to create them by hands if mapping contain few values and you don’t have many metrics that uses ‘named-numbers’.
For those who have not had fortune to face with this, I will explain. Enumerations it’s some sort of agreement about how to code different states or types or something identical by using only integer values. For example let’s see on SNMPv2-MIB::snmpEnableAuthenTraps:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | % snmptranslate -Td SNMPv2-MIB::snmpEnableAuthenTraps SNMPv2-MIB::snmpEnableAuthenTraps snmpEnableAuthenTraps OBJECT-TYPE -- FROM SNMPv2-MIB SYNTAX INTEGER {enabled(1), disabled(2)} MAX-ACCESS read-write STATUS current DESCRIPTION "Indicates whether the SNMP entity is permitted to generate authenticationFailure traps. The value of this object overrides any configuration information; as such, it provides a means whereby all authenticationFailure traps may be disabled. Note that it is strongly recommended that this object be stored in non-volatile memory so that it remains constant across re-initializations of the network management system." ::= { iso(1) org(3) dod(6) internet(1) mgmt(2) mib-2(1) snmp(11) 30 } |
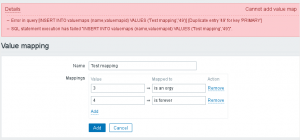
Here you can see, that integer '1' used to code 'enabled' and '2' for 'disabled', so if you want to see in your zabbix human friendly 'enabled/disable', you need to create value in your zabbix mapping first. It's not a difficult task, if your mapping small like this, but it's pain in the ass if your mapping consist many values. For example IF-MIB::ifType consist of 254 values. For completeness i need to say, that prior zabbix 3.0 you had not legal way to automate it.
When i first time searching for solution, i found that script in feature request ZBXNEXT-1424
Unfortunately it will break your db, about it you can read here. In Zabbix 3.0 value mappings API was introduced, now you are able to import/export mappings in XML format or you can do it via RPC.
Looks like it's time to a perl magic. Tadaam! Script that generate value mapping in XML format for specified OID. I placed it onto github: https://github.com/IvanBayan/Zabbix-oid2valuemapping here you will find requirements and examples of usage. In short you type in console something like this:
% perl ./oid2valuemapping.pl --oid SNMPv2-MIB::snmpEnableAuthenTraps |
And it will generate something like this:
<?xml version='1.0' standalone='yes'?> <zabbix_export> <date>2016-08-26T14:51:09Z</date> <value_maps> <value_map> <name>snmpEnableAuthenTraps</name> <mappings> <mapping> <newvalue>disabled</newvalue> <value>2</value> </mapping> <mapping> <newvalue>enabled</newvalue> <value>1</value> </mapping> </mappings> </value_map> </value_maps> <version>3.0</version> </zabbix_export> |
You need only few additional modules for perl and configured snmp.