Finally, i decided to try stm32, before i wrote firmwares only for AVR mega family (from now, when i say AVR MCU, i mean AVR mega family MCU), and was scared by tonns of code that you need for simply led blinking on STM32 MCU.
Now i can say, that programming of STM32 not so hard as it looks first time. After i understand logical structure of MCU core and how it work, it become easy.
OK, it was prelude.
Every time when i see comparison between AVR and STM32/STM8 MCU’s i faced with next arguments:
STM MCU’s have lower price, when they have more RAM, FLASH, GPIO pins and work frequency. Looks sweet. Today i want to tell the story about work frequency.
More than the operating frequency of the MCU, the faster it can handle events. STM32 MCU’s have maximum work frequency more than 20MHz (72MHz for STM32F103 that i have), when AVR MCU’s have only 20MHz. Is 72MHz a lot of or not? Two week ago i wanted to know, is it enough ~200MHz of STM32F4 to handle 10MSPS ADC on not? Two weeks ago i think ‘may be’. Now i think ‘not enought’.
Last Friday evening i blow the dust from oscilloscope and made little research.
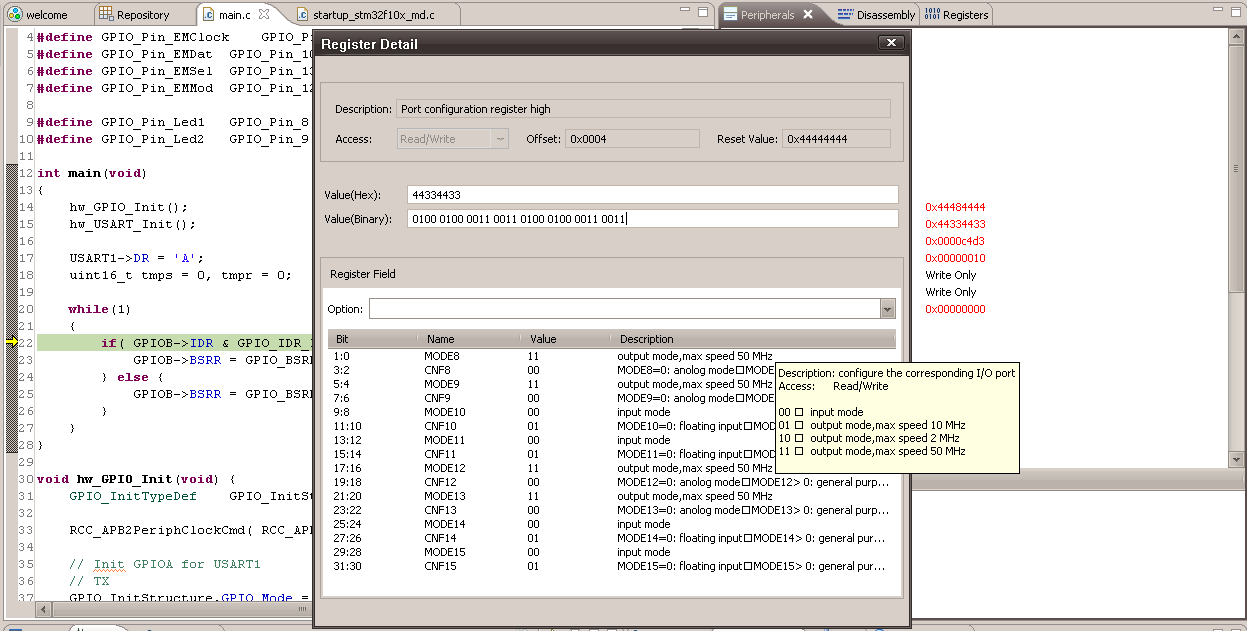
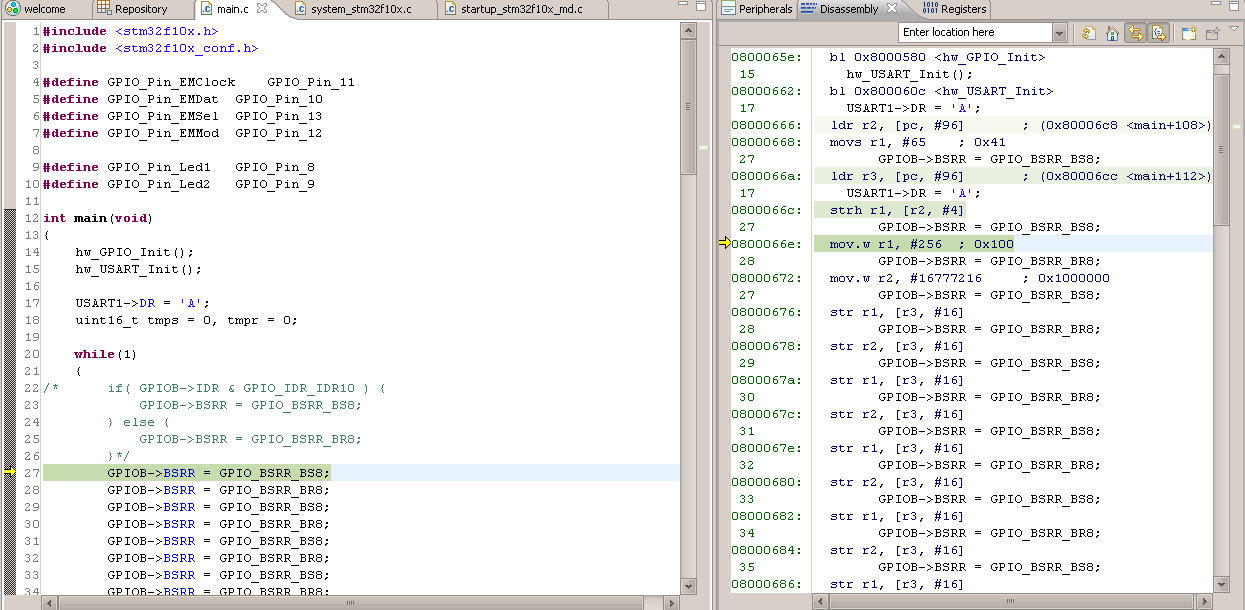
My basic code poll pin, by software, configured for input and set same signal on output pin, the code is there:
while(1) {
if( GPIOB->IDR & GPIO_IDR_IDR10 ) {
GPIOB->BSRR = GPIO_BSRR_BS8;
} else {
GPIOB->BSRR = GPIO_BSRR_BR8;
}
} |
while(1) {
if( GPIOB->IDR & GPIO_IDR_IDR10 ) {
GPIOB->BSRR = GPIO_BSRR_BS8;
} else {
GPIOB->BSRR = GPIO_BSRR_BR8;
}
}
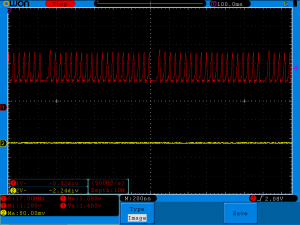
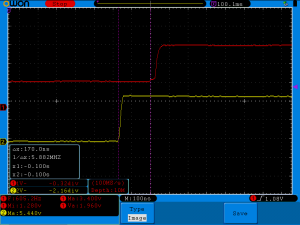
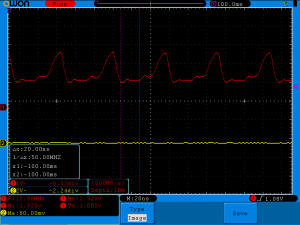
How many time MCU need to set same level on GPIO pin as on input pin? May be 140nS (near 10 clocks on 72MHz) will enought?

Nope. 480ns. It near 34 cycles. The period of 480ns has frequency of 2MHz, may be i forgot to change speed of gpio port?

Nope. May be i forgot to switch on external quartz or forgot to configure PLL?
Nope. Hmm, may be optimization can help? Let’s try to switch on -O3:
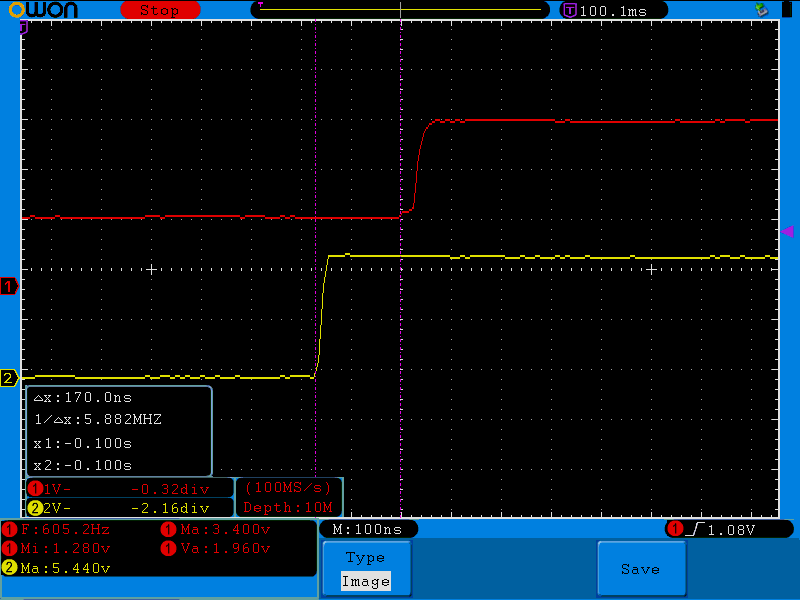
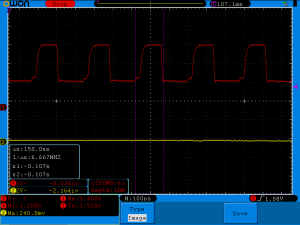
Much better, 170 ns. MCU need near 12 cycles, to detect signal and change state of one GPIO speed. Do not forget, MCU just pooling one pin and change state of another, it do not do valuable work.Okay, but what the maximum speed you can get, if you will just change the state of GPIO pin?
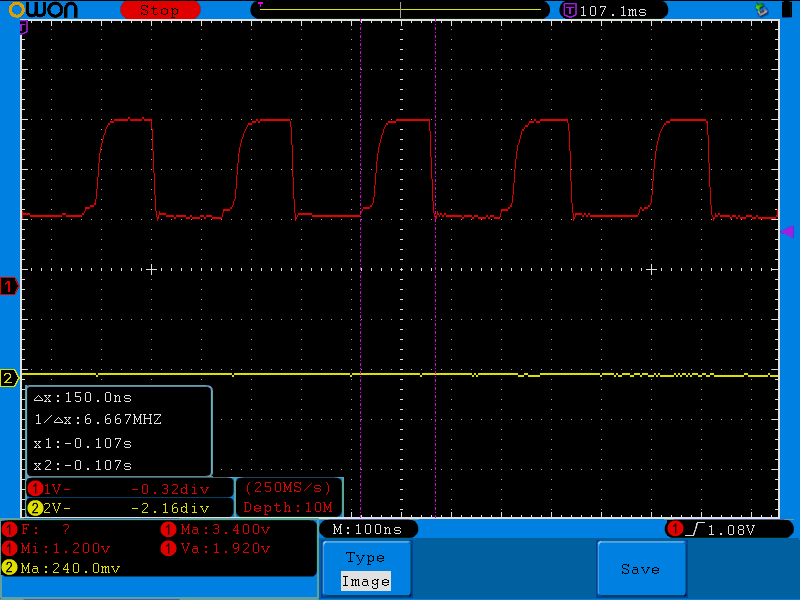
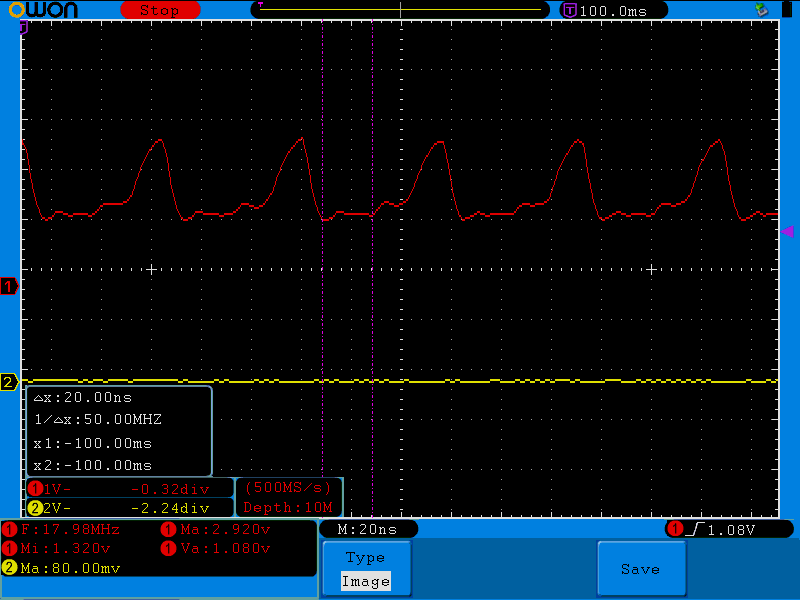
Is it possible to hit theoretical maximum of 50MHz (max clock speed of GPIO ports on STM32F103):
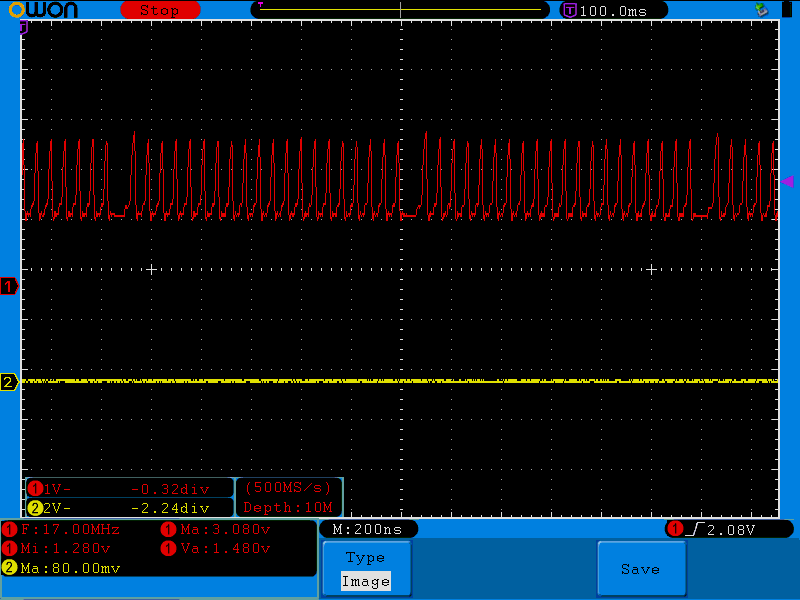
Just 6MHz. Let me switch on optimization for you:
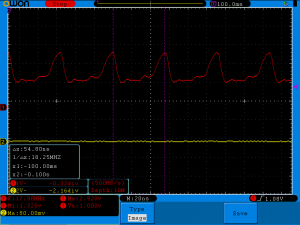
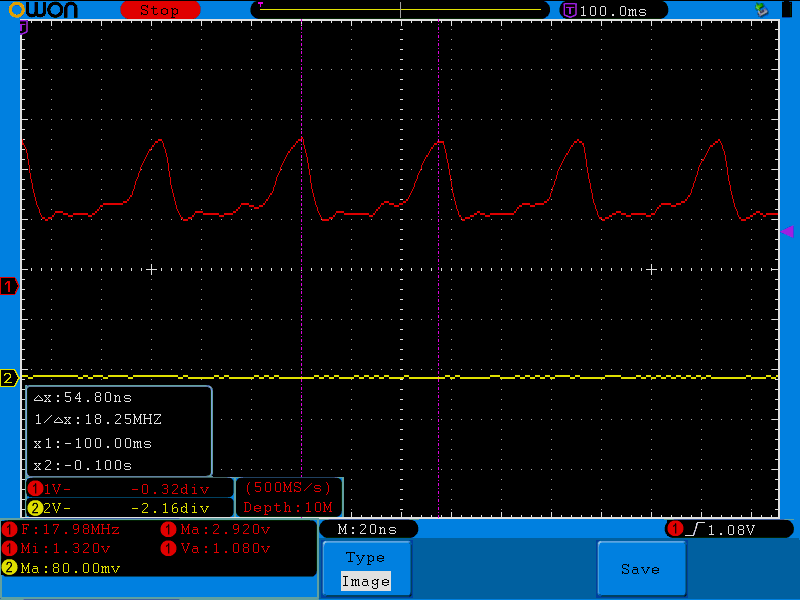
Looks like there only 36MHz, let’s look on the code:
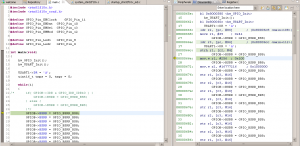
I can’t see why they can’t reach 50MHz. If you look on disassembler view, you can see, that MCU just store different values on constant address.
In fairness i must to say, if you set cursors on oscilloscope in different manner, you can achieve 50MHz:
It is hard to say what way of measurement is wrong, i think the second, because first time it is easy to see time of 2 periods. Without a doubt, the second way STM advertising department would have liked more.
BONUS:
A picture where is while cycle occurs: